|
I graduated from UC San Diego with a PhD, where I worked at Advanced Robotics and Controls Lab (ARClab), advised by Prof. Michael Yip. I also received my B.S./M.S degree in Electrical Engineering from UC San Diego. |

|
|
My research interests lie in the fields of Computer Vision and Robotics. During my work, I have focused on state estimation, 3D reconstruction, and their applications in space and surgical robots. |
|
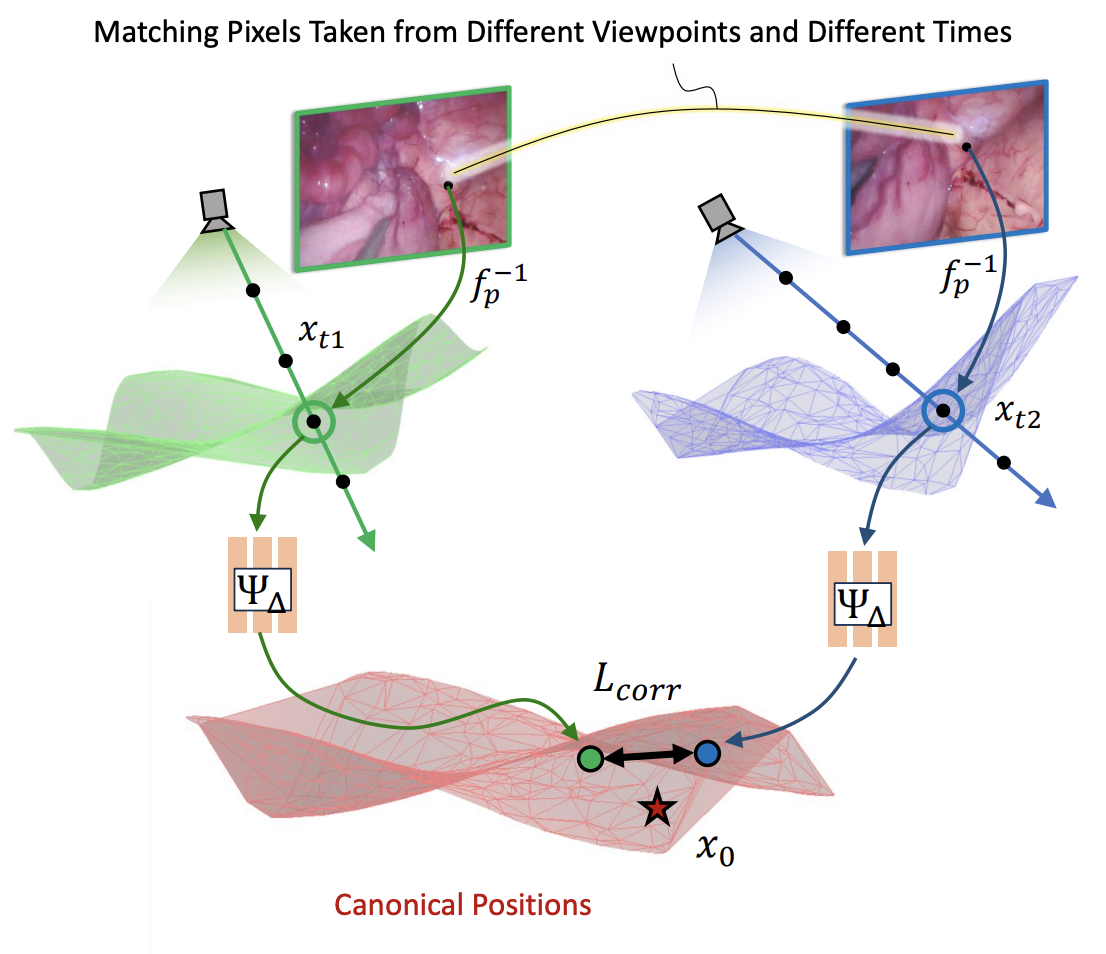
Shreya Saha, Zekai Liang, Shan Lin, Jingpei Lu, Michael Yip, Sainan Liu IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2025 [arXiv] |
|
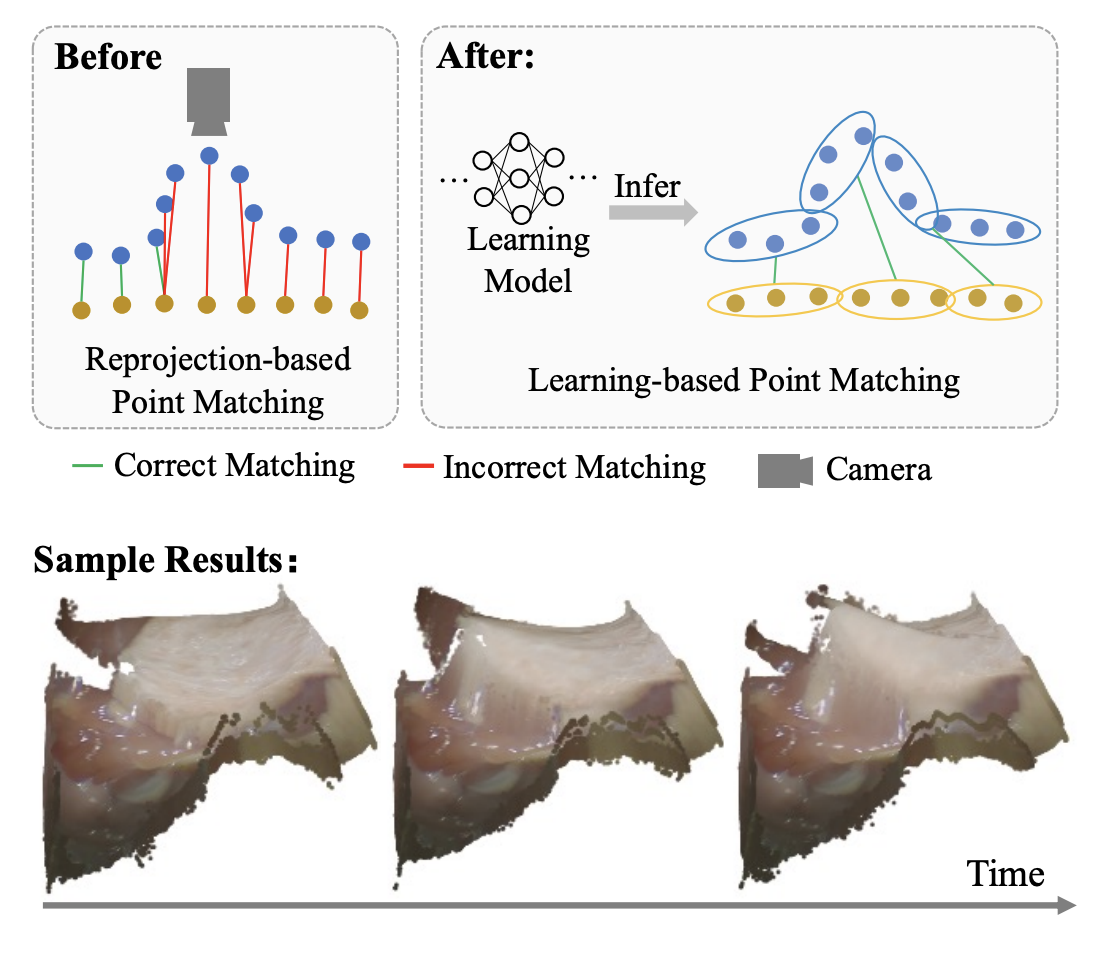
Shan Lin, Albert J. Miao, Ali Alabiad, Fei Liu, Kaiyuan Wang, Jingpei Lu, Florian Richter, Michael C. Yip IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 [arXiv] |

|
Jingpei Lu, Florian Richter, Shan Lin, Michael C. Yip IEEE Conference on Robotics and Automation (ICRA), 2024 [arXiv] |
|
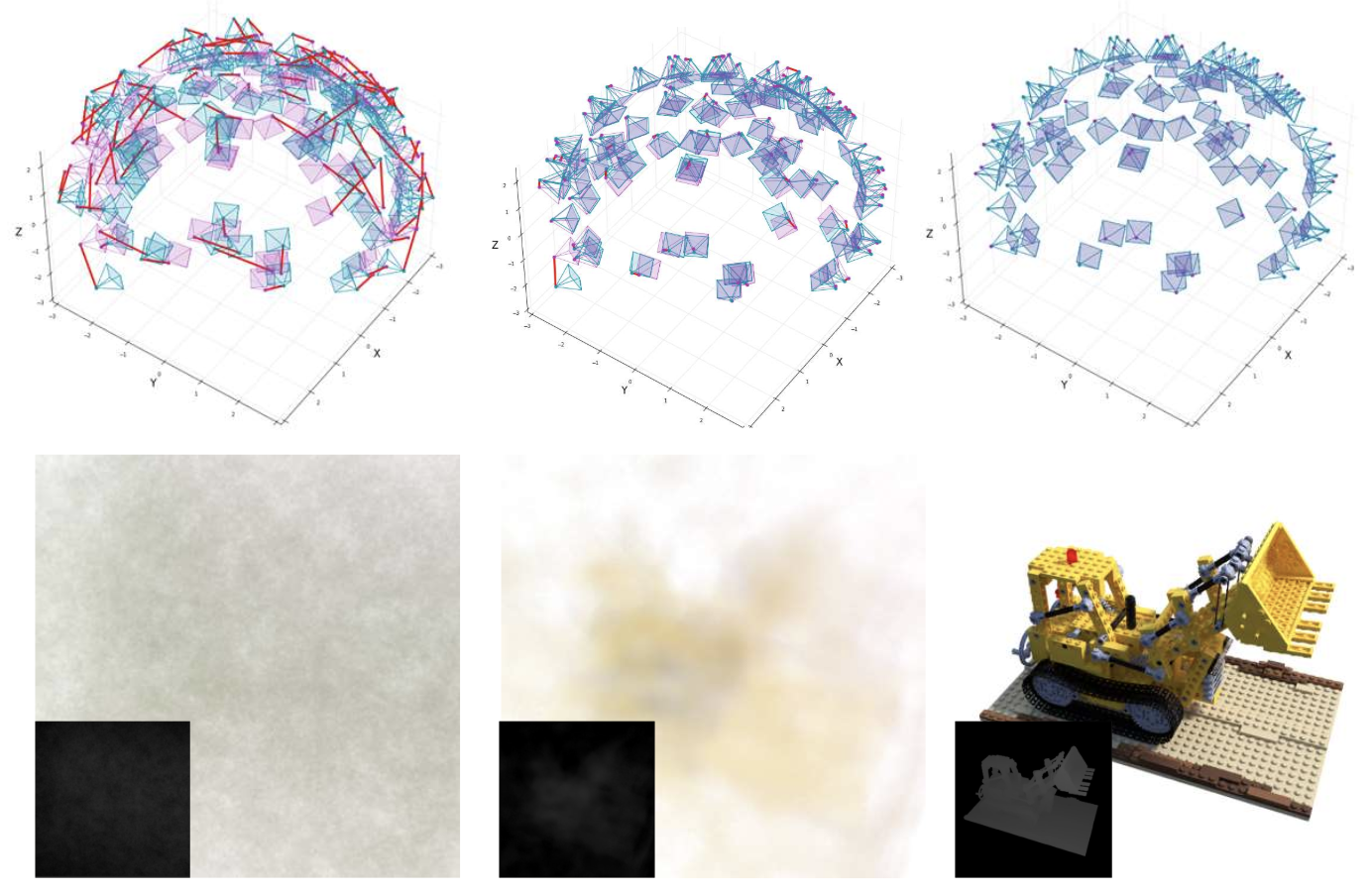
Sainan Liu, Shan Lin, Jingpei Lu, Alexey Supikov, Michael Yip IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2024 [arXiv] |
|
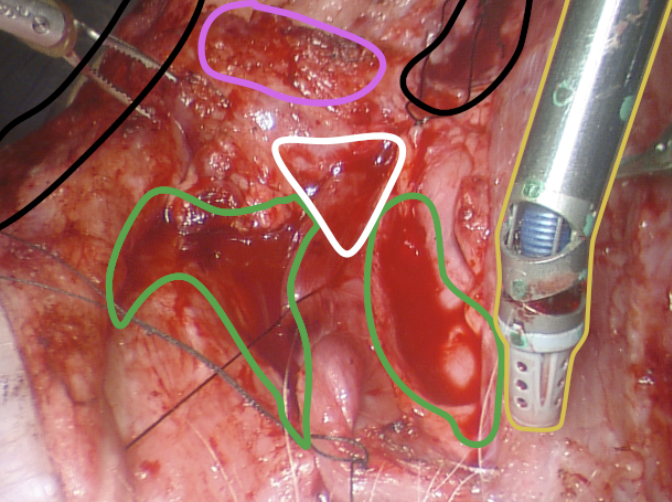
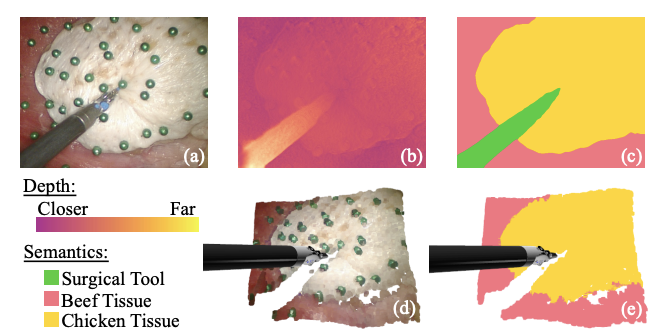
Albert J. Miao Shan Lin, Jingpei Lu, Florian Richter, Benjamin Ostrander, Emily K. Funk, Ryan K. Orosco, Michael C. Yip International Symposium on Medical Robotics (ISMR), 2024 Best Student Paper Award [arXiv] |
|
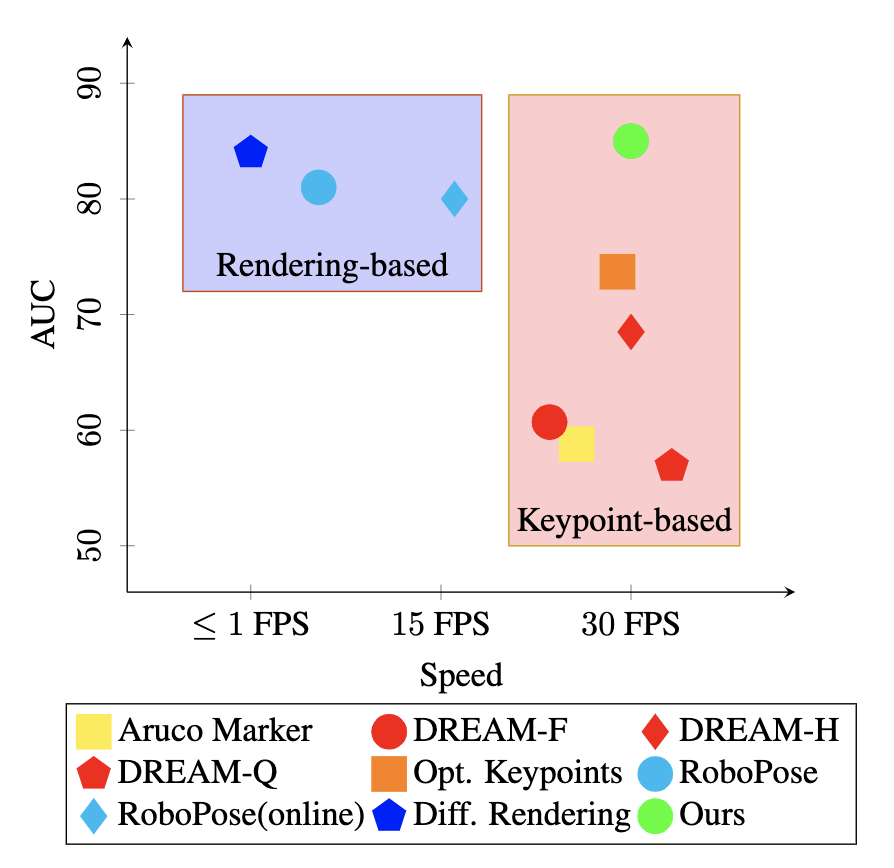
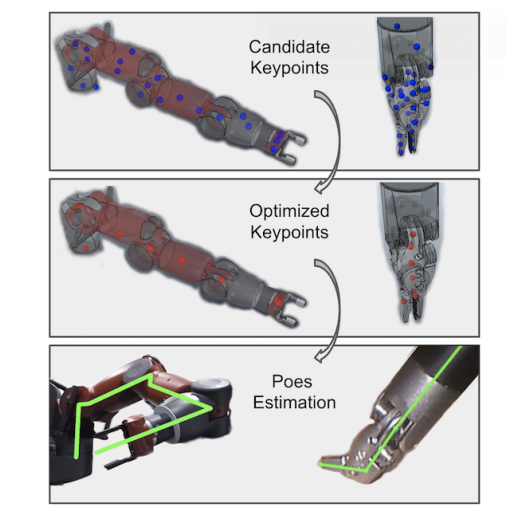
Jingpei Lu, Florian Richter, Michael C. Yip IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023 [arXiv] [code] [website] |
|
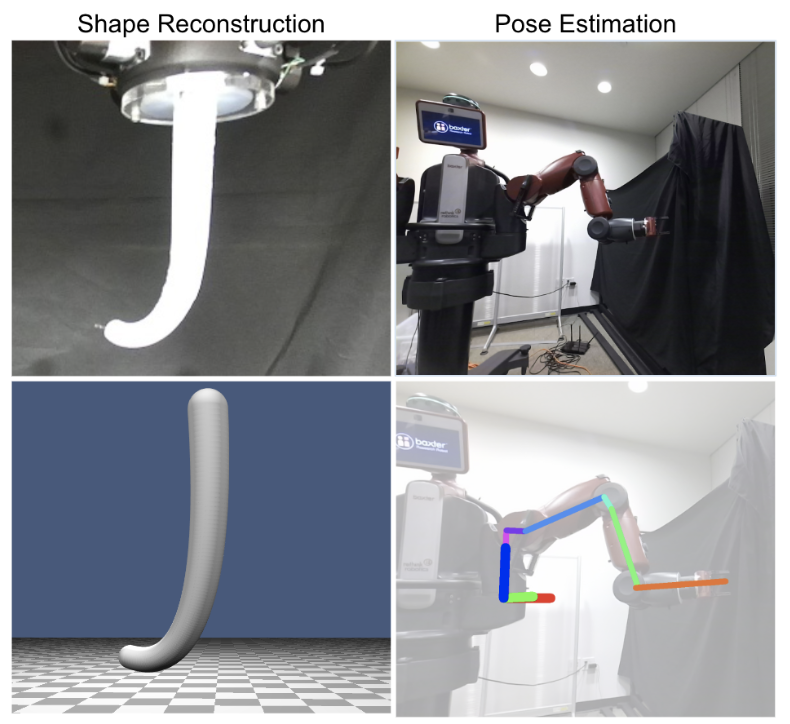
Fei Liu*, Entong Su*, Jingpei Lu, Mingen Li, Michael C. Yip (* Equal contributions) IEEE Robotics and Automation Letters (RA-L), March 2023 [arXiv] |
|
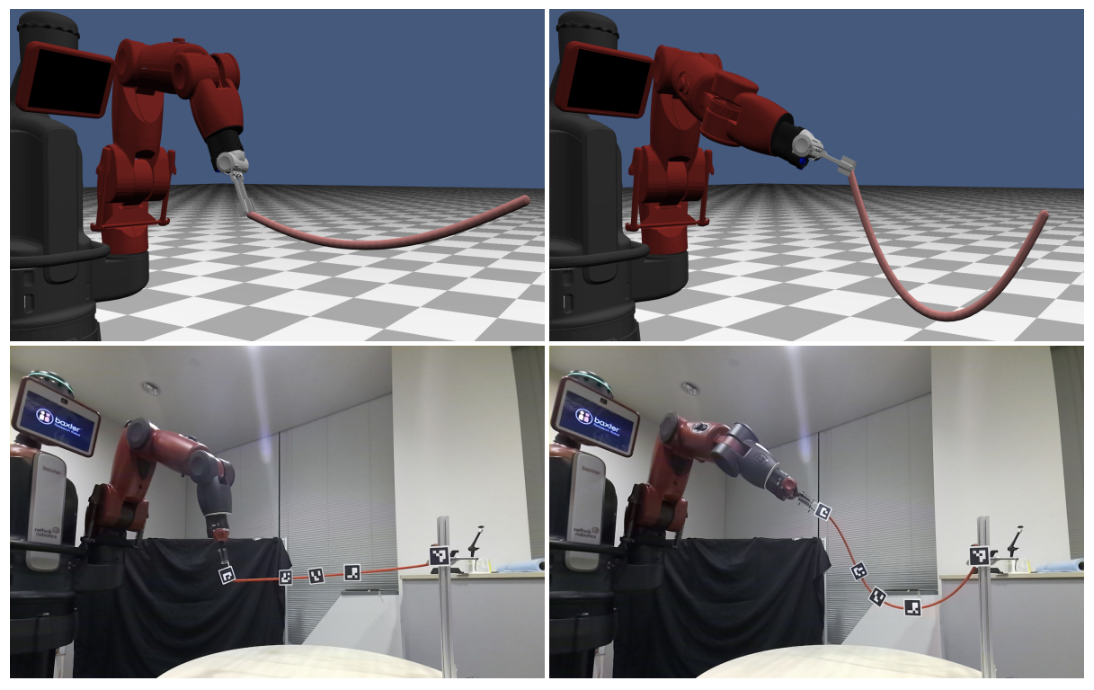
Jingpei Lu*, Fei Liu*, Cedric Girerd, Michael C. Yip (* Equal contributions) IEEE Conference on Robotics and Automation (ICRA), 2023 [arXiv] |
|
Shan Lin, Albert J. Miao, Jingpei Lu, Shunkai Yu, Zih-Yun Chiu, Florian Richter, Michael C. Yip IEEE Conference on Robotics and Automation (ICRA), 2023 [arXiv][code] |
|
Jingpei Lu, Florian Richter, Michael C. Yip IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 2, pp. 4622-4629, April 2022 [arXiv] [website] |
|
|
Florian Richter, Jingpei Lu, Ryan K. Orosco, Michael C. Yip IEEE Transactions on Robotics (T-RO), vol. 38, no. 3, pp. 1653-1670, June 2022 [arXiv] [code] |
|
Fei Liu, Zihan Li, Yunhai Han, Jingpei Lu, Florian Richter, Michael C. Yip IEEE Conference on Robotics and Automation (ICRA), 2021 [arXiv] |
|
Jingpei Lu*, Ambareesh Jayakumari*, Florian Richter, Yang Li, Michael C. Yip (* Equal contributions) IEEE Conference on Robotics and Automation (ICRA), 2021 [arXiv] |
|
Yang Li*, Florian Richter*, Jingpei Lu, Emily K. Funk, Ryan K. Orosco, Jianke Zhu, Michael C. Yip (* Equal contributions) IEEE Robotics and Automation Letters (RA-L), vol. 5, no. 2, pp. 2294-2301, April 2020 [arXiv] [website] |
|
Website templete from here. |